Revision c5c1a99111274471c854342b012b60fbfaf35011 (click the page title to view the current version)
Change of Basis
Reading Ma 2004 Chapter 2.2-2.3
Motion examples
- Translation \[\vec{x}' = \vec{x}+\vec{t}\]
- Rotation \[\vec{x}' = \vec{x}\cdot R\]
- But note that \(R\) is not an arbitrary matrix.
- We’ll return to the restrictions
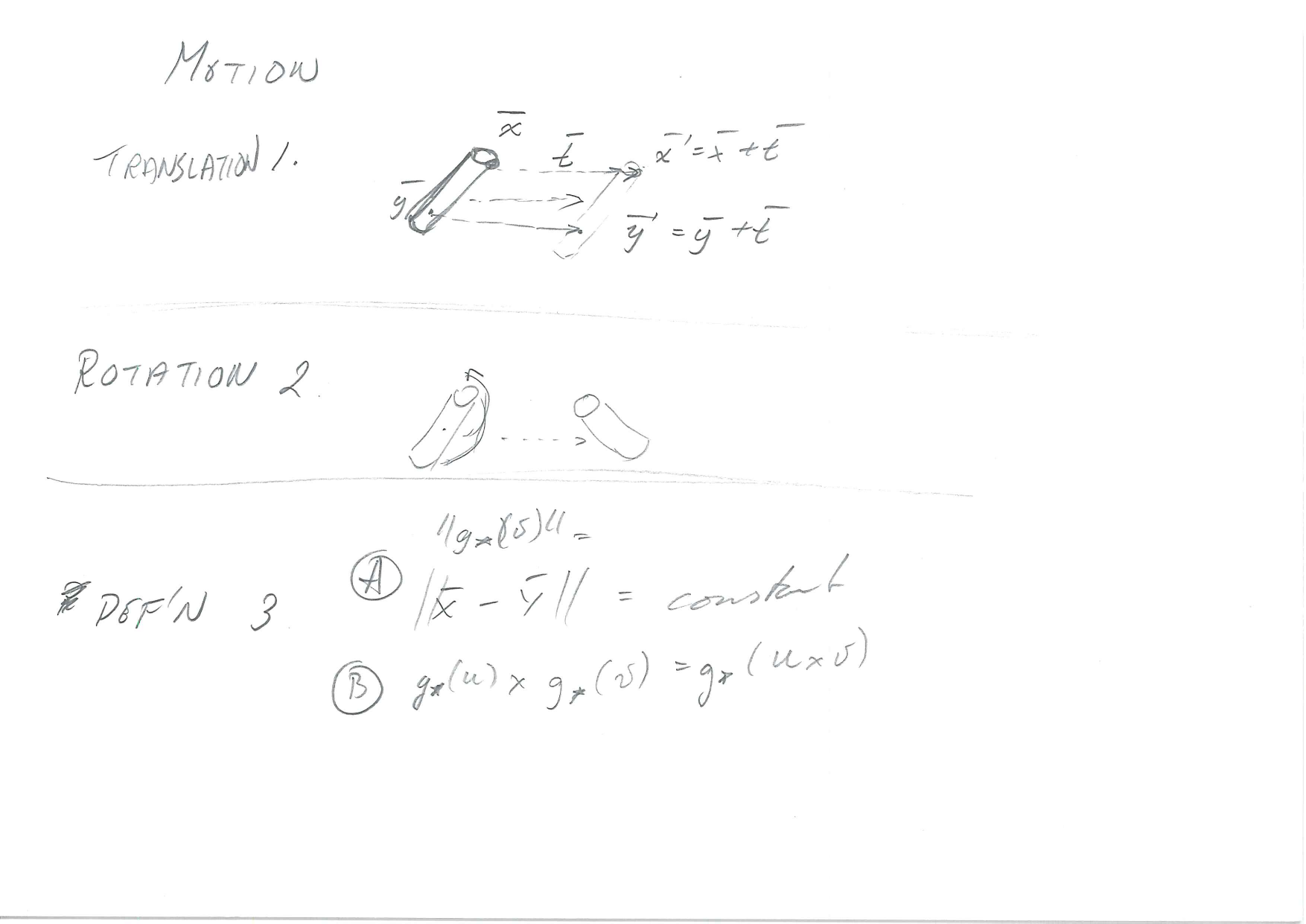
Definition: Rigid Body Motion
- 3D Object is a set of points in \(\mathbb{R}^3\)
- If the object moves, the constituent points move
- The points have to move so that they preserve the shape of the object
Constraints
Let \(\vec{X}(t)\) and \(\vec{Y}(t)\) be the coordinates of points \(\vec{x}\) and \(\vec{x}\) at time \(t\).
- Preserve distance between points
- \(||\vec{X}(t)-\vec{Y}(t)||\) is constant
- Preserve orientation
- i.e. avoid mirroring
- we have to preserve cross-products
- If the right hand rule turns into a left hand rule, we have had mirroring.
Let \(u=\vec{X}-\vec{Y}\) be a vector, and \(g_*(u)=g(\vec{X})-g(\vec{Y})\) the corresponding vector after motion.
Preserving the cross-product means \[g_*(u)\times g_*(v) = g_*(u\times v), \forall u,v\in\mathbb{R}^3\]
Change of Basis
Bases
- Basis aka. frame
- Unit vectors: \(\vec{e}_1\), \(\vec{e}_2\), \(\vec{e}_3\)
- The meaning of a tuple to denote a vector
- \(\vec{x}=[x_1,x_2,x_3]= x_1\cdot\vec{e}_1+x_2\cdot\vec{e}_2+x_3\cdot\vec{e}_3\)
- Orthonormal frame: orthogonal and unit length \[\vec{e}_i\vec{e}_j=\delta_{ij} = \begin{cases} 1 \quad\text{if } i=j\\ 0 \quad\text{if } i\neq j \end{cases} \]
Local and Global Basis
- 3D Scenes are built hierarchically
- Each object is described in a local basis
- and then placed in the global basis.
- Why?
- Save computational work
- Local changes affect only local co-ordinates
- Component motion independent of system motion
Example
E.g. our co-ordinates: 62°28’19.3“N 6°14’02.6”E
Are these local or global co-ordinates?
Rotation
Consider common origin first.