
Image Distortion
Non-Linear Distortion and Calibration
NTNU, Noregs Teknisk-Naturvitskaplege Universitet
September 2023
Two Non-Linear Distortion Effects
- Radial
- Tangential
Radial Distortion


{kind=link}
A Goode projection of a Visible Earth image collected by the Earth Observatory experiment of the U.S. Government's NASA space agency. The reticle is 15 degrees in latitude and longitude. (Public domain, courtesy of NASA) Source
{kind=link}
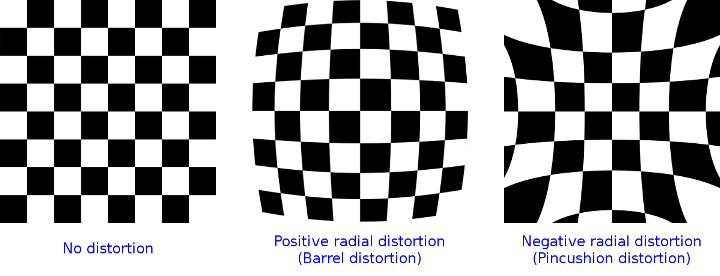
Distortion Examples from theOpenCV documentation
Radial Distortion
- Simplest effective model:
$$ \begin{align} x &= x_d(1 + a_1r^2 + a_2r^4) \\ y &= y_d(1 + a_1r^2 + a_2r^4) \\ r &= \sqrt{x_d^2+y_d^2} \end{align} $$
- $(x,y)$ are the true co-ordinate of some point
- $(x_d,y_d)$ are the co-ordinates in the distorted image
OpenCV uses a sixth order model
$$ \begin{align} x_d &= x(1 + a_1r^2 + a_2r^4 + a_3r^6) \\ y_d &= y(1 + a_1r^2 + a_2r^4 + a_3r^6) \end{align} $$
Tangential Distortion

Tangential Distortion


Tangential Distortion occurs when the lens and image plane are not parallel.
A pixel $(x,d)$ is moved to $(x_d,y_d)$ defined by
$$ \begin{align} x_d &= x+ [2p_1xy+p_2(r^2+2x^2)] \\ y_d &= y+[p_1(r^2+2y^2)+2p_2xy] \end{align} $$
Closure
Time for exercises
- Calibrate your own camera
- Use OpenCV
- Checkerboards in the class set