
Machine Vision
Introductory Session
NTNU, Noregs Teknisk-Naturvitskaplege Universitet
21 August 2023
- Briefing Overview and History
- Install and Test Software - Simple tutorials
- Debrief questions and answers recap of linear algebra
Introduction
- What is your name?
- Why do you take this module?
Practical Information
- BlackBoard : announcements - discussion fora - links
- Wiki : http://www.hg.schaathun.net/maskinsyn/
- living document - course content
- Taught sessions : Monday 12-4pm and Thursday 8am-12
Questions - either in class or in discussion fora
Taught Format
- Sessions 4h twice a week
- 1h briefing + 2h exercise + 1h debrief (may vary)
- Variety of exercise genres
- No Compulsory Exercises
- but not less work
- Feedback in class
- please ask for feedback on partial work
- Keep a diary.
- Highlight your take-aways
- Remember partial solution for reuse
- Use the textbooks to learn what you need to do
- Not as a checklist of what you need to learn
Learning Outcomes
- Knowledge
- The candidate can explain fundamental mathematical models for digital imaging, 3D models, and machine vision
- The candidate are aware of the principles of digital cameras and image capture
- Skills
- The candidate can implemented selected techniques for object recognition and tracking
- General competence
- The candidate has a good analytic understanding of machine vision and of the collaboration between machine vision and other systems in robotics
- The candidate can exploit the connection between theory and application for presenting and discussing engineering problems and solutions
Exam
- Oral exam \(\sim 20\) min.
- First seven minutes are yours
- make a case for your grade wrt. learning outcomes
- your own implementations may be part of the case
- essentially that you can explain the implementation analytically
- The remaing 13-14 minutes is for the examiner to explore further
- More detailed assessment criteria will be published later
Vision
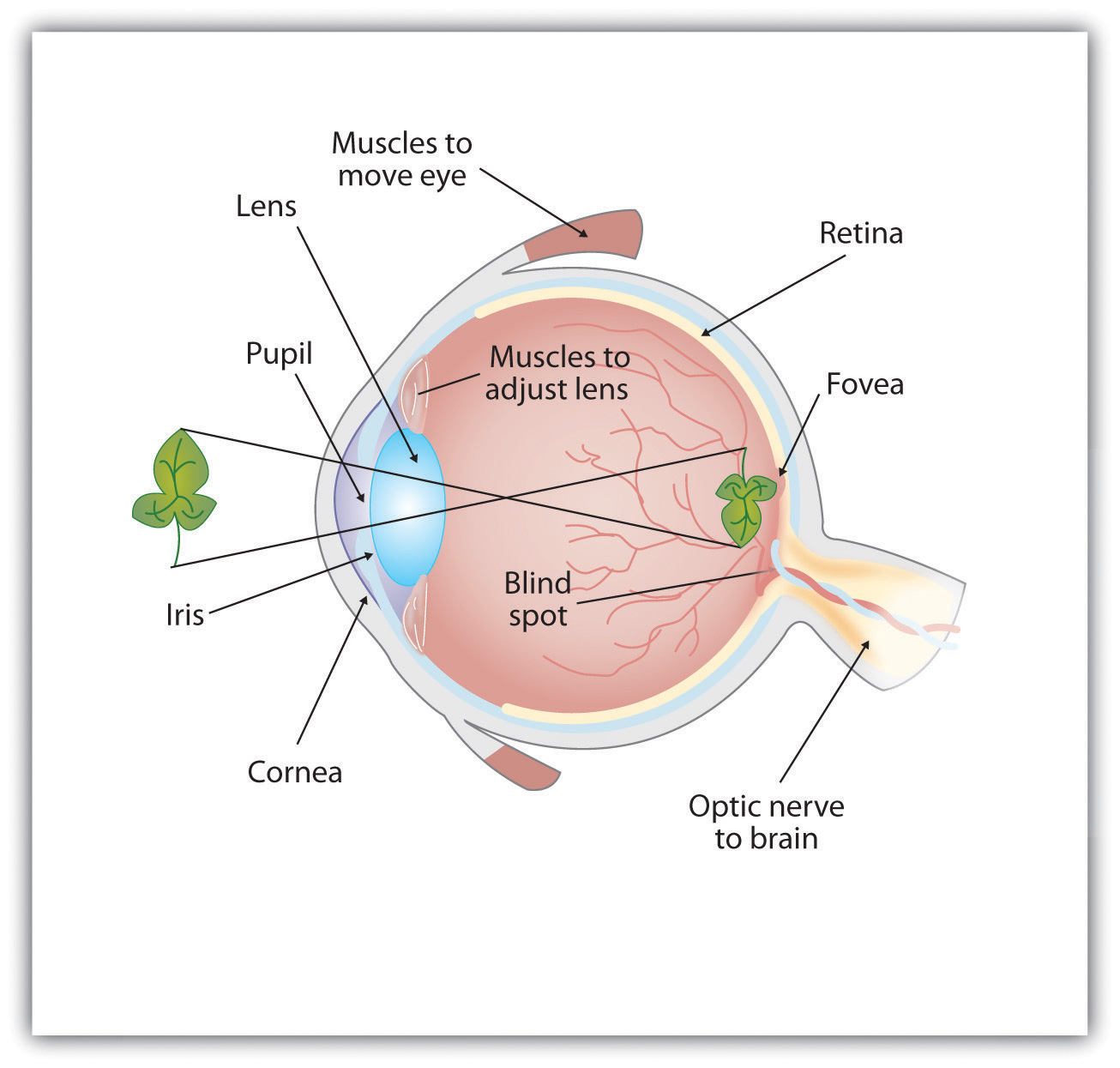
Eye Model from Introduction to Psychology by University of Minnesota
- Vision is a 2D image on the retina
- Each cell perceives the light intencity of colour of the light projected thereon
- Easily replicated by a digital camera
- Each pixel is light intencity sampled at a given point on the image plane
Cognition
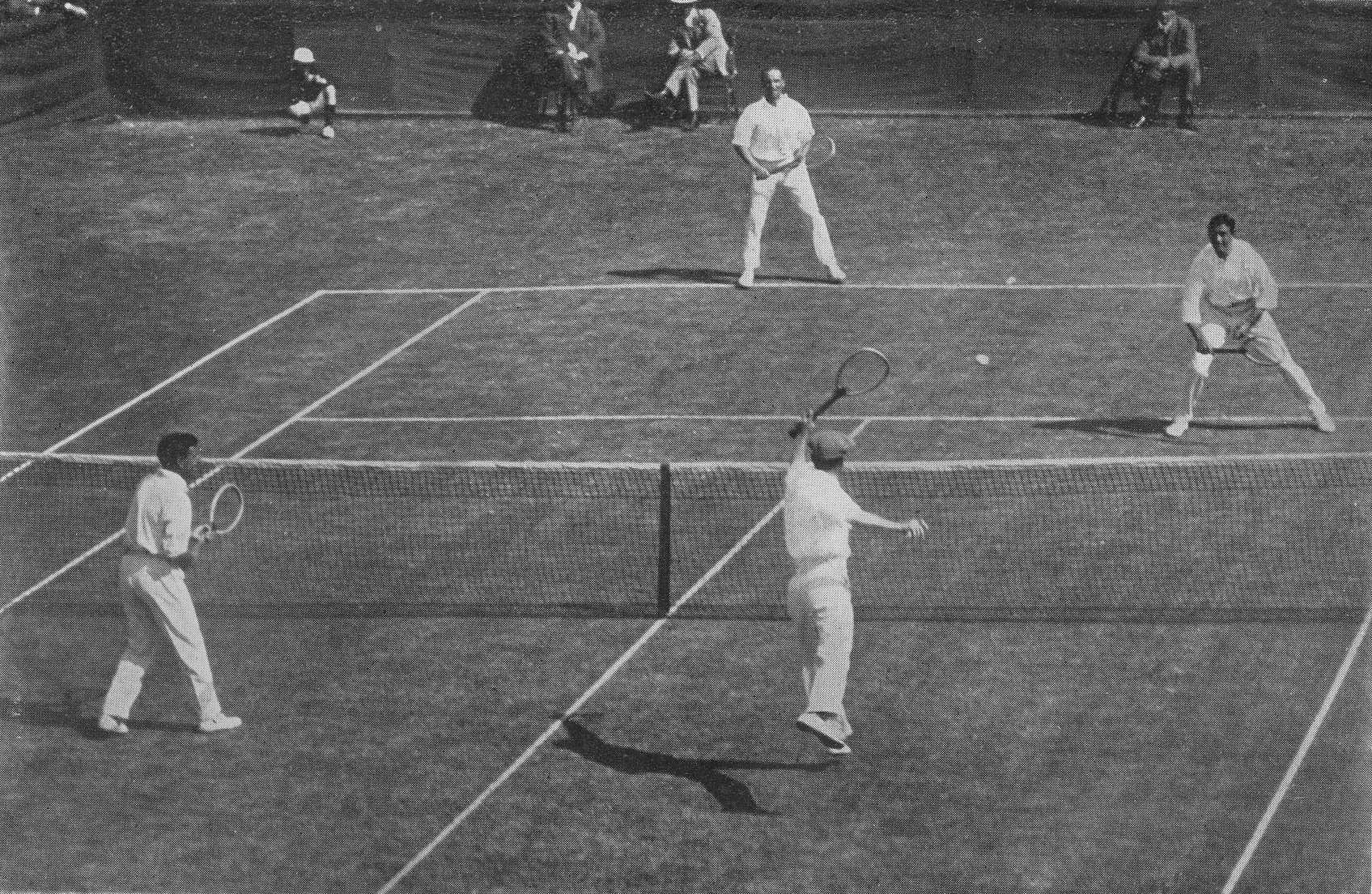
1912 International Lawn Tennis Challenge
- Human beings see 3D objects
- not pixels of light intencity
- We recognise objects - cognitive schemata
- we see a ball - not a round patch of white
- we remember a tennis match - rather than four people with white clothes and rackets
- We observe objects arranged in depth
- in front of and behind the net
- even though they are all patterns in the same image plane
- 3D reconstruction from 2D retina image
- and we do not even think about how
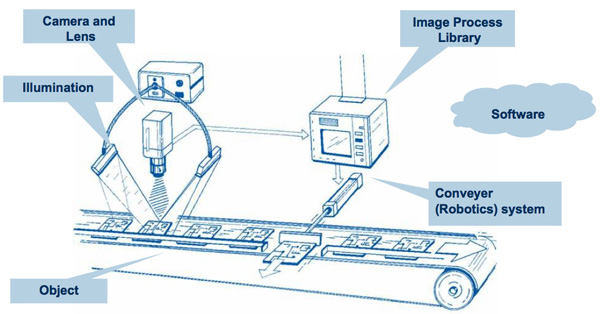
Applications
- Artificial systems interact with their surroundings
- navigate in a 3D environment
- Simpler applications
- face recognition
- tracking in surveillance cameras
- medical image diagnostics (classification)
- image retrieval (topics in a database)
- detecting faulty products on a conveyor belt (classification)
- aligning products on a conveyor belt
- Other advances in AI creates new demands on vision
- 20 years ago, walking was a major challenge for robots
- now robots walk, and they need to see where they go ...
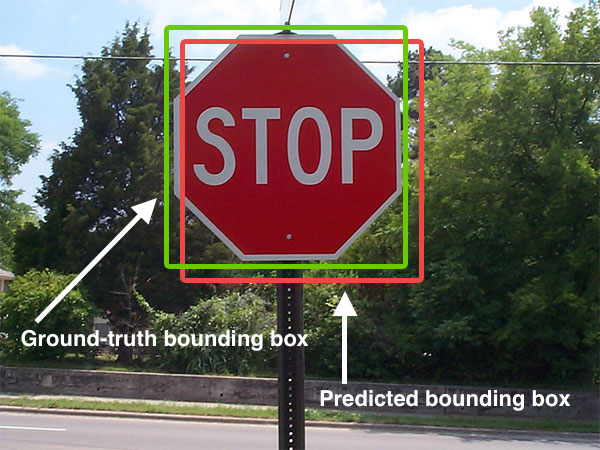
By Adrian Rosebrock , CC BY-SA 4.0,wikimedia commons
Wikimedia
200~By NASA on The Commons No restrictions,Wikimedia Commons
Focus for the module
- Artificial systems interact with their surroundings
- navigate in a 3D environment
- This means
- Geometry of multiple views
- Relationship between theory and practice
- ... between analysis and implementation
- Mathematical approach
- inverse problem; 3D to 2D is easy, the inverse is hard
- we need to understand the geometry to know what we program
Subproblems
- 3D modelling
- Linear Algebra
- Distortion and calibration
- 2D Geometry
- Feature detection
- image (signal) processing
- possibly machine learning
Big Problem
Vision System
i.e. putting it all together
History
- 1435 Della Pictura - first general treatise on perspective
- 1648 Girard Desargues - projective geometry
- 1913 Kruppa: two views of five points suffice to find
- relative transformation
- 3D location of the points
- (up to a finite number of solutions)
- mid 1970s first algorithms for 3D reconstruction
- 1981 Longuet-Higgins: linear algorithm for structure and motion
- late 1970s E. D. Dickmans starts work on vision-based autonomous cars
- 1984 small truck at 90 km/h on empty roads
- 1994 180 km/h, passing slower cars
Python
- Demos and tutorials in Python
- not Jupyter - we need to interface cameras and interactive displays easily
- you can use whatever language you want
- Demos and help on Unix-like system
- exercise session today
- install necessary software
- use the tutorials to see that things work as expected
- In the debrief, we will start briefly on the mathematical modelling
- Quick demo
- Do your tutorials - discuss - ask questions
- After the exercise we resume for a debrief
Debrief
- What have you learnt from the exercise?
- Did you encounter any problems or questions to be discussed?
- 3D Mathematics
Vectors and Points
| A point in space | $\mathbf{X} = [X_1,X_2,X_3]^\mathrm{T}\in\mathbb{R}^3$ |
| A bound vector, from $\mathbf{X}$ to $\mathbf{Y}$ | $\vec{\mathbf{XY}}$ |
| A free vector is the same difference, but without any specific anchor point | represented as $\mathbf{Y} - \mathbf{X}$ |
- Set of free vectors form a linear vector space
- note! points do not
- The sum of two vectors is another vector
- The sum of two points is not a point
Dot product (inner product)
$$x=\begin{bmatrix}x_1\\x_2\\x_3\end{bmatrix}\quad y=\begin{bmatrix}y_1\\y_2\\y_3\end{bmatrix}$$
$$\langle x,y\rangle = x^\mathrm{T}y = x_1y_1+x_2y_2+x_3y_3$$
Euclidean Norm: $||x|| = \sqrt{\langle x,x\rangle}$
Orthogonal vectors when $\langle x,y\rangle=0$
Cross product
$$x\times y = \begin{bmatrix} x_2y_3 - x_3y_2 \\ x_3y_1 - x_1y_3 \\ x_1y_2 - x_2y_1 \end{bmatrix} \in \mathbb{R}^3$$
Observe that
- $y\times x = -x\times y$
- $\langle x\times y, y\rangle= \langle x\times y, x\rangle$
$$x\times y = \hat xy \quad\text{where}\quad \hat x = \begin{bmatrix} 0 & -x_3 & x_2 \\ x_3 & 0 & -x_1 \\ -x_2 & x_1 & 0 \end{bmatrix} \in \mathbb{R}^{3\times3}$$
$\hat x$ is a skew-symmetric matrix because $\hat x=-\hat x^\mathrm{T}$
i.e. the cross-product is a linear operation
Right Hand Rule

By Acdx - Self-made, based on Image:Right_hand_cross_product.png,
Matrix Arithmetics
Matrices define linear operations on vectors
$$ \begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & 1 & 0 \\ \end{bmatrix} \cdot \begin{bmatrix} 2 \\ 0 \\ 1 \end{bmatrix} = \begin{bmatrix} 2 \\ 1 \\ 0 \end{bmatrix} $$
$$ \begin{bmatrix} a_{11} & a_{21} & a_{23} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \\ \end{bmatrix} \cdot \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} a_{11}x_1 & a_{21}x_2 & a_{23}x_3 \\ a_{21}x_1 & a_{22}x_2 & a_{23}x_3 \\ a_{31}x_1 & a_{32}x_2 & a_{33}x_3 \\ \end{bmatrix} $$
- Change of Basis
- Rigid Body Motion