Briefing on Image Formation
This briefing is designed for self-study, with a number of videos or slide sets with audio.
Lesson 0. Setting the scene
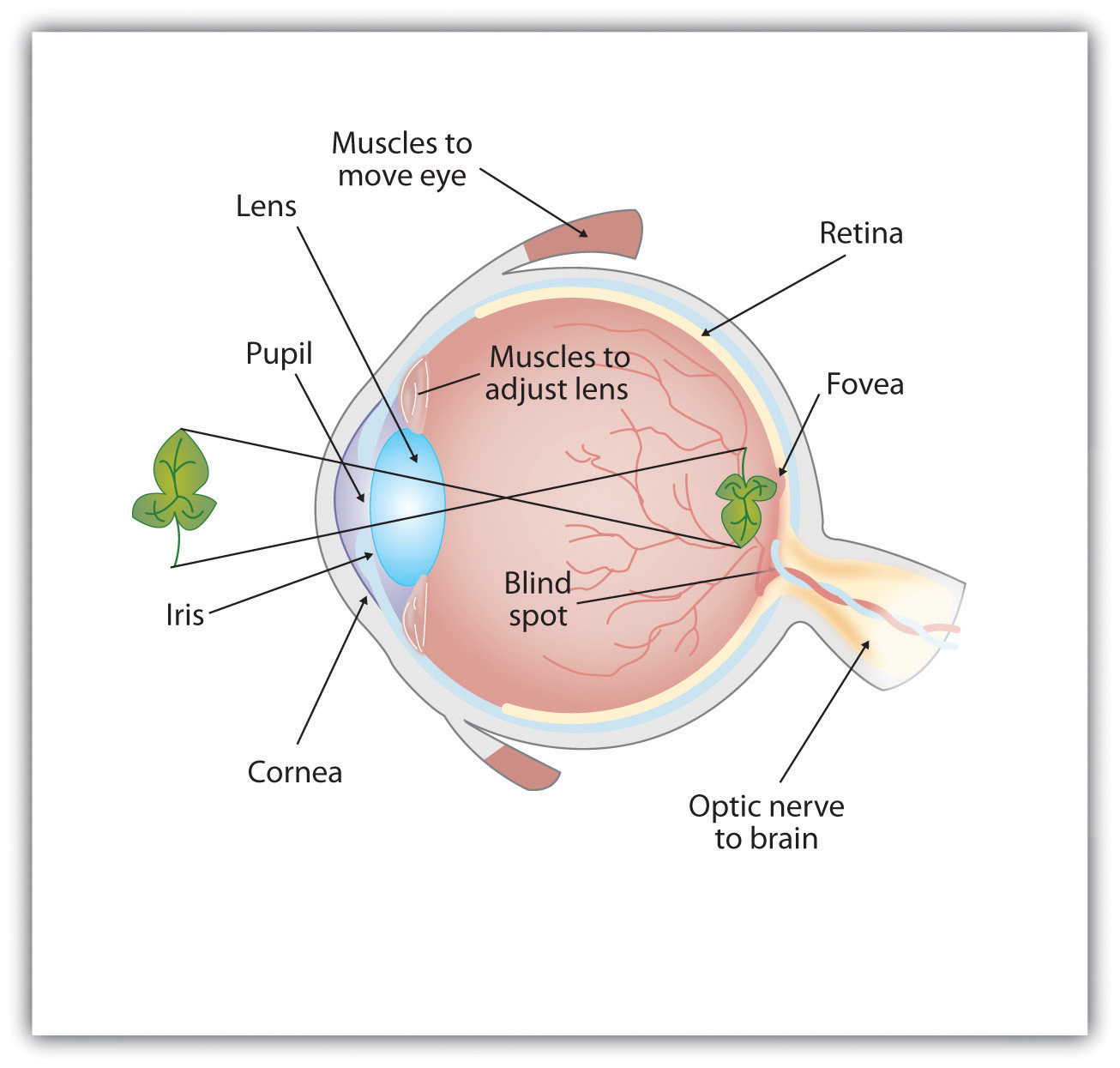
- An image of the real world is projected on the Retina.
- 3D is projected to 2D
- Modern Cameras (more or less) replicate the Eye Model.
- Fine-grained sensors perceive the rays of light
- The goal today is to understand what we get when we project from 3D to 2D
Vision is the inverse problem of image formation
Lesson 1. Image Representation
The goal in this video is to see how images are represented on a computer and how we manipulate them in python.
After the video, you should be aware of the following concepts,
- The image as an array of pixels.
- The image as a function \(I(x,y)\).
Lesson 2. Lens Models
The goal in this talk is to model the projection from 3D to 2D and be able to calculate the position of points. Concepts to remember
- Thin Lens Model
- Pinhole (camera) model
- The lens equation (ideal projection)
- Optional The main talk gives the lens equation only in the pinhole model. We can also derive The Lens Equation in the thin lens model.
Lesson 3. Perspective and Vanishing points
The goal of the lesson is
- to be able to use drawings and algebra to reason about 2D and 3D models.
- understand perspective and why we get vanishing points.
Note particularly the point of using drawings. Most students and academics only really start thinking when they have started drawing. Only truly exceptional people are able to think about what to draw before they start doing it. If in doubt, draw it.
For this reason I have not tried to polish an argument. I am trying to show you how I may reason to develop a proof, and it is this search methodology that I try to show you.
Credits
Introduction to Psychology by University of Minnesota is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License, except where otherwise noted.