Revision 6e5349f5802bc8b600508331e7f36162f97cf09b (click the page title to view the current version)
Relative Pose
Reading Ma 2004 Chapter 5
The Epipolar Constraint
- Two cameras, two co-ordinate frames
- Relative Pose: transformation \((R,T)\) from Camera Frame 1 to Camera Frame 2.
- Consider a point \(p\) in 3D, it has
- co-ordinates \(\mathbf{X}_i\) in Camera Frame \(i\)
- The projection of \(\mathbf{X}_i\) in homogeneous co-ordinates is called \(\mathbf{x}_i\)
- \(\mathbf{X}_i = \lambda_i\matbf{x}_i\)
- Combining this with the relation \(\mathbf{X}_2=R\mathbf{X}_1+T\), we get \[\lambda_2\mathbf{x}_2} = R\lambda_1\mathbf{x}_1 + T\]
- To simplify, we multiply by \(\hat T\) to get \[\lambda_2\hat T\mathbf{x}_2} = \hat TR\lambda_1\mathbf{x}_1 + \hat TT\]
- The last term is zero because \(T\times T=0\) \[\lambda_2\hat T\mathbf{x}_2} = \hat TR\lambda_1\mathbf{x}_1\]
- Now \(\mathbf{x}_2\) is perpendicular on \(T\times\mathbf{X}_2\) so \[0=\mathbf{x}_2^T\lambda_2\hat T\mathbf{x}_2} = \mathbf{x}_2^T\hat TR\lambda_1\mathbf{x}_1\]
- Since \(\lambda_1\) is a scalar, we can simplify \[0= \mathbf{x}_2^T\hat TR\mathbf{x}_1\] This is the epipolar constraint
- \(E=\hat TR\) is called the essential matrix
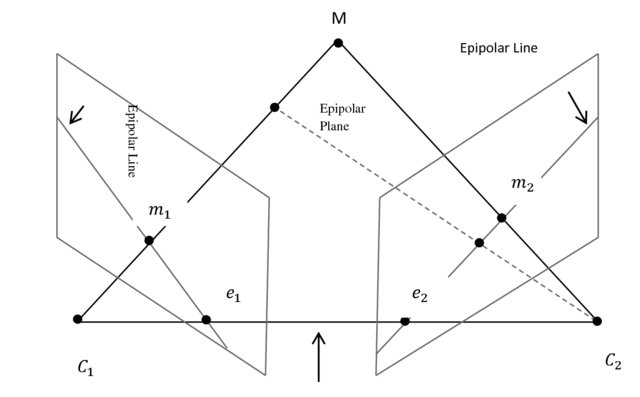
Some Jargon
- For each point \(p\), we have
- a epipolar plane \(\langle o_1,o_2,p\rangle\)
- epipolar line \(\ell_i\) as the intersection of the epipolar plane and the image plane
- The epipoles \(\mathbf{e}_i\) is the projection of origo onto the image plane of the other camera.
- Note that the epipoles are on the line \(\langle o_1,o_2\rangle\), and hence in the epipolar plane
Some properties
Proposition 5.3(1)
\[\mathbf{e}_2^TE = E\mathbf{e}_1=0\]
- This is because
- \(\mathbf{e}_2\sim T\) and \(\mathbf{e}_1\sim R^TT\)
- \(E=\hat TR\)
- \(T\hat T = T\times T=0\)
Proposition 5.3(2)
Proposition 5.3(3)
- Both the image point and the epipole lie on the epipolar line